A Review of Vision-based Vehicle Detection for UAV-based Traffic Monitoring: Experimental Insights and Future Directions
Authors: Jianlin Ye, Christos Kyrkou
Venue: IEEE Transactions on Intelligent Transportation Systems (T-ITS)
Location:
Pages:
Publisher: IEEE
DOI:
Abstract
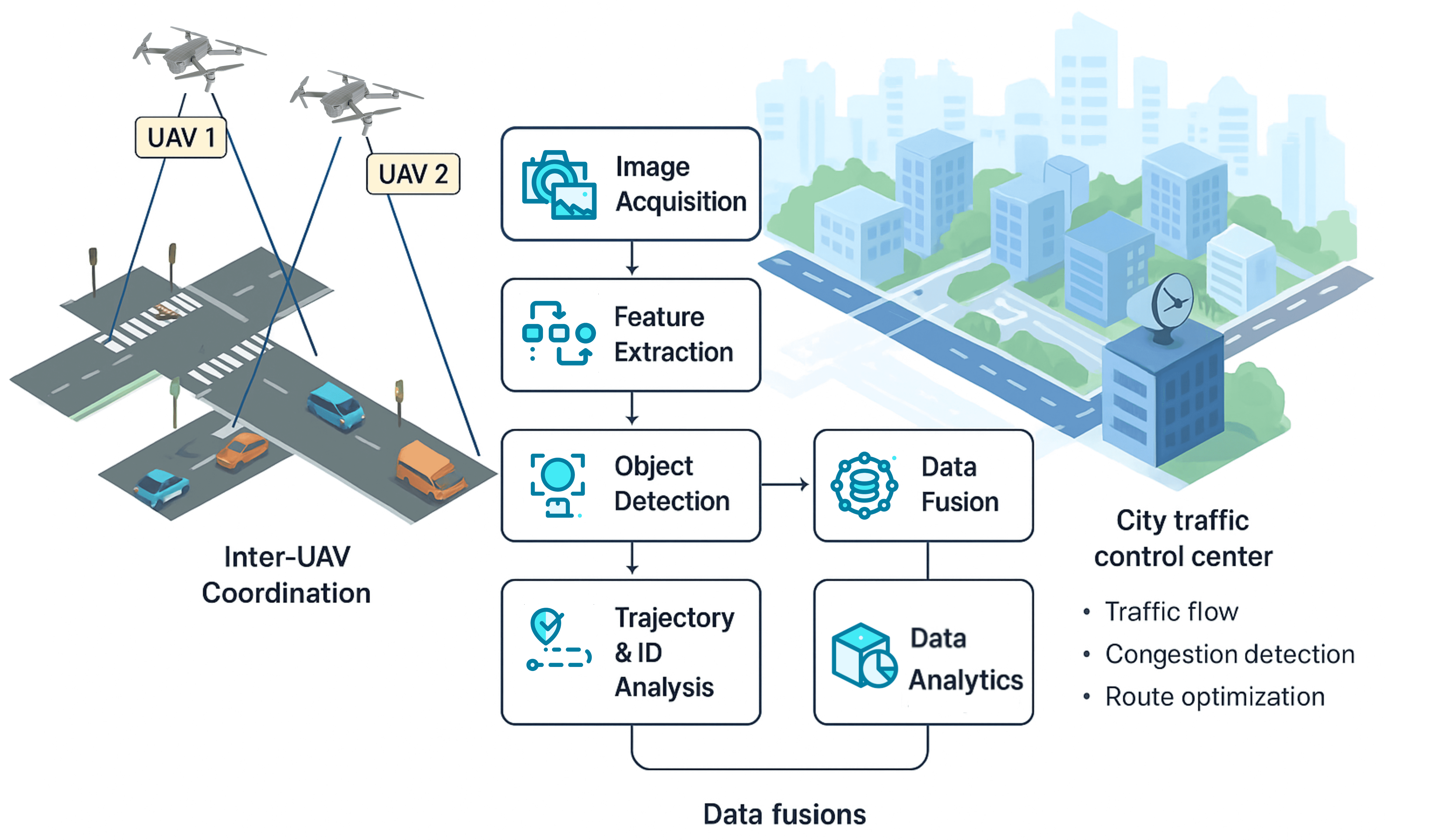
In Intelligent Transportation System (ITS), unmanned aerial vehicle (UAV)-based surveillance offers an innovative solution to traffic surveillance with wide coverage and real-time data collection capabilities. In comparison to fixed ground-based infrastructure, UAVs are able to respond to dynamic traffic but present challenges such as vehicle detection at varying altitudes, compensation for motion-induced image variations and efficient processing of high-resolution images. Deep learning has been largely beneficial on improving the detection accuracy; however, for practical deployment, a critical assessment of the accuracy, latency, and harmonization with current transportation systems needs to be carefully considred. This survey reviews recent advancements in the UAV-based traffic monitoring, with a primary focus being deep neural network models for traffic analytics in various urban settings. Three main challenges identified in the literature are ensuring compatibility with traffic control systems, achieving real-time processing to optimize traffic flow, and maintaining robust detection in different environmental conditions. Existing solutions often lack comprehensive frameworks for utilizing UAV captured data to respond to incidents and manage traffic effectively. Future research should focus on optimal detection models, edge processing, and adaptive control integration to improve the responsiveness of urban traffic management.
BibTeX
Comments